휴머노이드 로봇
#배터리 #로봇 #휴머노이드용배터리 #전고체배터리 #휴머노이드로봇 #휴머노이드
- 최근이슈
- 2025년
- 2025-03-21,휴머노이드 로봇 판매 목표치)
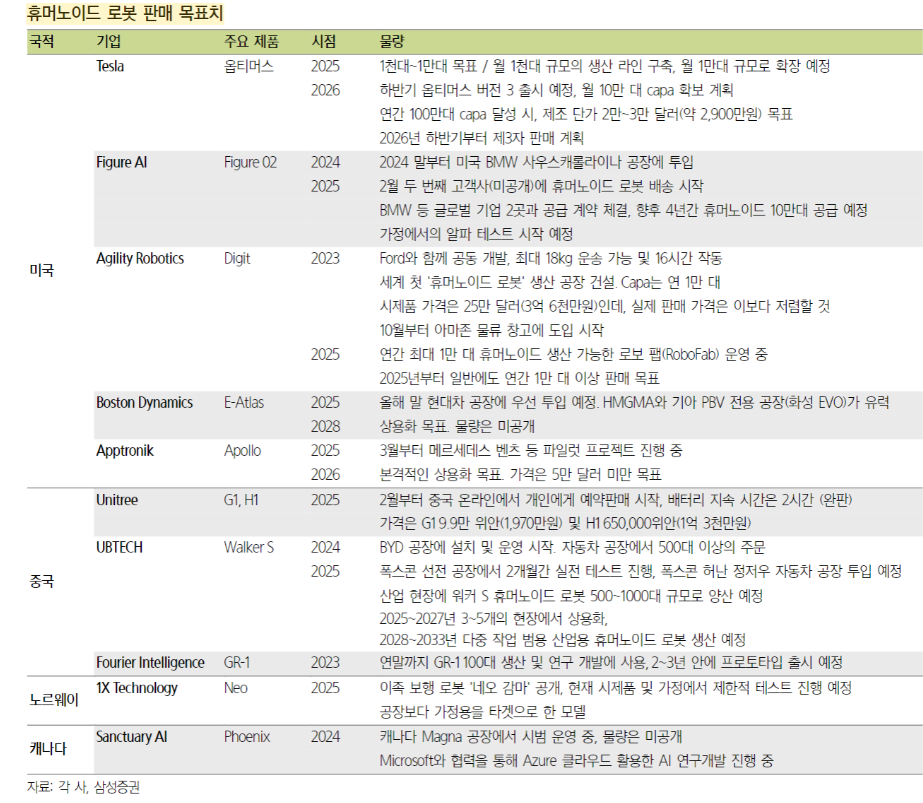
- 2025-03-21,휴머노이드 로봇 판매 목표치)
- 2025년
1. 휴머노이드 로봇 개념 및 정의
1.1. 휴머노이드 로봇의 정의
- 휴머노이드 로봇은 인간과 유사한 외형(양팔, 양다리, 머리 등)을 갖추고, 인지-판단-수행을 자율적으로 수행할 수 있는 로봇입니다.
- 물리적 AI(Physical AI): 인공지능(AI)을 물리적 환경에서 활용하여 특정 작업을 수행하거나 인간과 상호작용할 수 있도록 설계된 시스템.
- 주요 특징:
- 인간 환경(공장, 물류센터, 가정 등)에 바로 투입 가능.
- 인간형 손과 팔을 통해 기존 도구 및 기계를 그대로 사용할 수 있음.
- 다양한 작업(물류, 제조, 서비스, 의료 등)에서 활용 가능.
1.2. 휴머노이드 로봇의 필요성
- 인구 고령화와 노동력 부족: 미국, 일본, 유럽 등 선진국에서 노동력 감소가 심화되고 있음.
- 글로벌 노동시장 규모: 약 30조 달러(TAM, Total Addressable Market)로 추정.
- 다양한 활용 가능성:
- 제조업: 공장 자동화.
- 물류: 창고 관리 및 배송.
- 서비스업: 가사 도우미, 의료 보조.
- 위험 작업: 건설, 채굴, 방산 등.
2. 휴머노이드 로봇의 기술적 특징
2.1. 브레인(Brain): AI 및 소프트웨어
- AI 모델:
- Multi-modal AI: 언어, 이미지, 행동 데이터를 통합하여 학습.
- 예: Google의 RT-2, NVIDIA의 GR00T N1, Figure.ai의 HELIX.
- 강화학습(RL) 및 역강화학습(IRL): 로봇의 자율 학습을 통해 작업 성공률 향상.
- 디지털 트윈: 가상 시뮬레이션 환경에서 로봇의 학습 및 테스트.
- NVIDIA의 Omniverse 플랫폼 활용.
- Multi-modal AI: 언어, 이미지, 행동 데이터를 통합하여 학습.
- 컴퓨팅 인프라:
- 온보드 컴퓨팅: NVIDIA Jetson, Qualcomm Robotics RB5.
- 클라우드 컴퓨팅: AWS, Google Cloud, Microsoft Azure.
2.2. 바디(Body): 하드웨어 구성 요소
-휴머노이드를 비롯한 로봇의 핵심 기술 = 두뇌, 관절, 체력)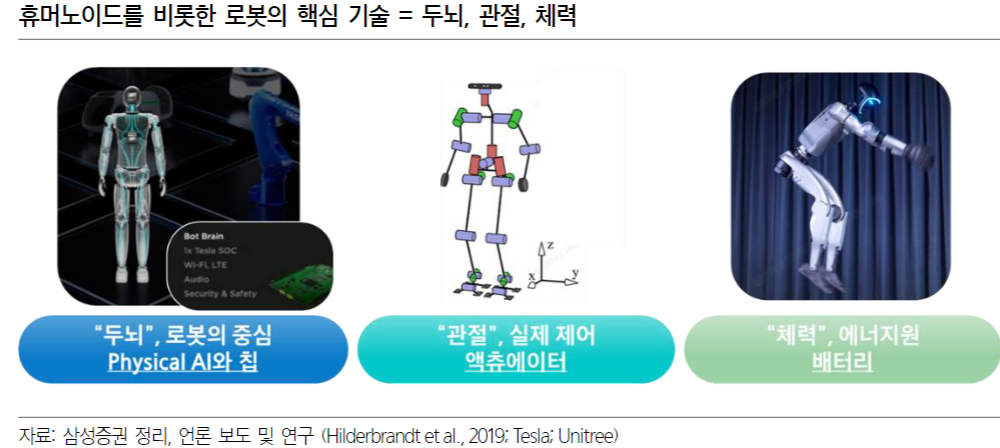 - 로봇을 상용화하는 데에 가장 큰 투자비가 소요되는 항목은 지능을 고도화시키기 위한 훈련비용
- 일론머스크는 로봇을 훈련하는 데는 자율주행 대비 최소 10배의 훈련 비용이 필요하다고 언급하였다. 테슬라(TSLA)는 2023~2024년에 10만 GPU(엔비디아 H100 성능)를 갖춘 Cortex데이터 센터 구축에 50억 달러를 지출하였다. 로봇 훈련을 위한 데이터 센터에는 500억달러 이 상의 투자가 필요한 것이다.
- 데이터센터 500억 달러의 투자비는 30만대 자동차 공장 40개를 지을 수 있는 금액으로, 1,200만대 생산 Capa를 의미한다. 현재 글로벌 판매대수 1위 업체는 토요타로 연간 1천 만대 내외를 기록 중이다. 가장 로봇이 필요한 완성차 입장에서도, 지금까지 보다 훨씬 더 큰 규모의 투자를 단시간 내에 쏟아 부어야 한다.
- 로봇을 상용화하는 데에 가장 큰 투자비가 소요되는 항목은 지능을 고도화시키기 위한 훈련비용
- 일론머스크는 로봇을 훈련하는 데는 자율주행 대비 최소 10배의 훈련 비용이 필요하다고 언급하였다. 테슬라(TSLA)는 2023~2024년에 10만 GPU(엔비디아 H100 성능)를 갖춘 Cortex데이터 센터 구축에 50억 달러를 지출하였다. 로봇 훈련을 위한 데이터 센터에는 500억달러 이 상의 투자가 필요한 것이다.
- 데이터센터 500억 달러의 투자비는 30만대 자동차 공장 40개를 지을 수 있는 금액으로, 1,200만대 생산 Capa를 의미한다. 현재 글로벌 판매대수 1위 업체는 토요타로 연간 1천 만대 내외를 기록 중이다. 가장 로봇이 필요한 완성차 입장에서도, 지금까지 보다 훨씬 더 큰 규모의 투자를 단시간 내에 쏟아 부어야 한다.
2.2.1. 액추에이터(Actuator)
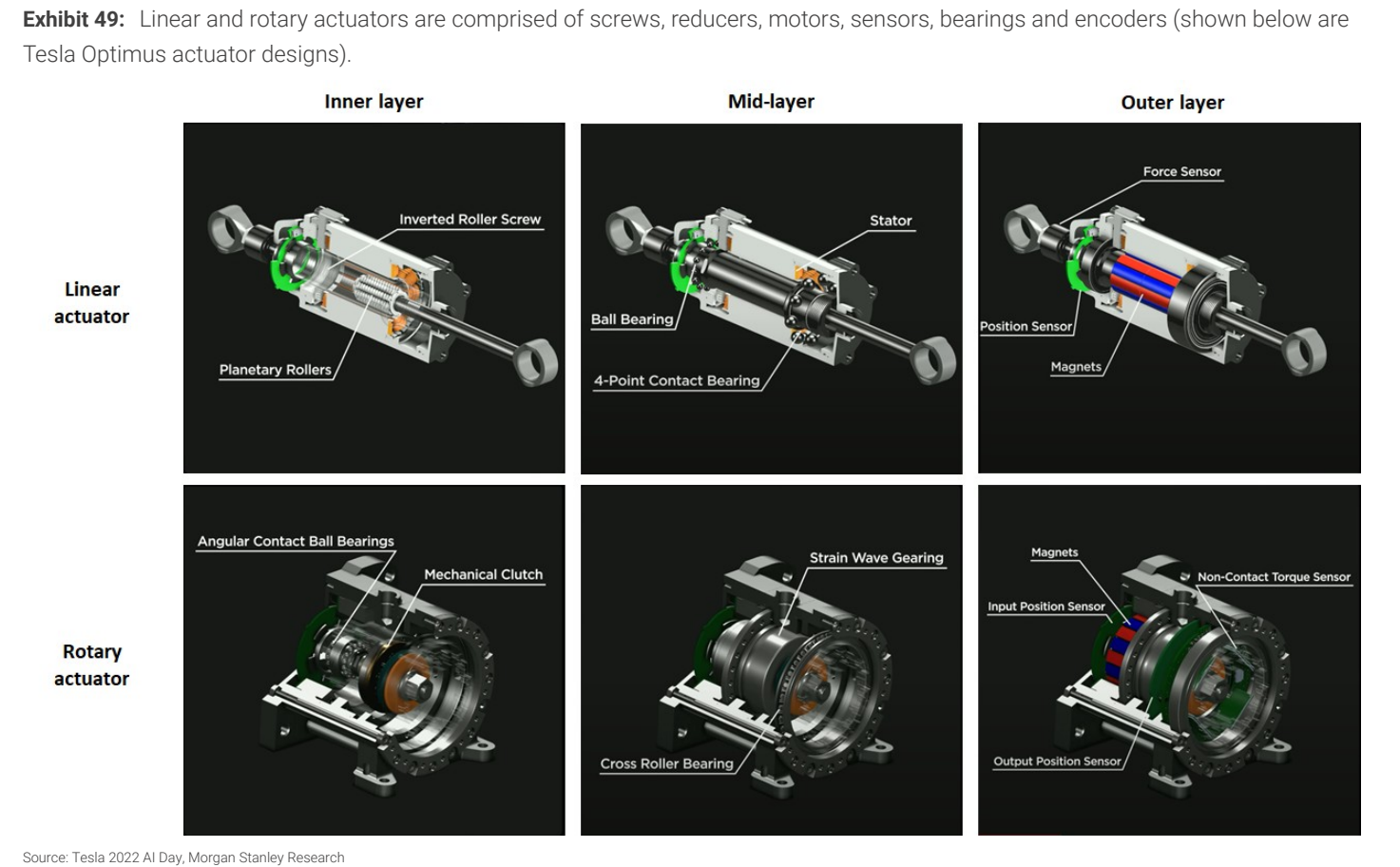
- 역할: 전기, 유압, 공압 에너지를 물리적 움직임으로 변환.
- 유형:
- 로터리 액추에이터:
- 구조: 브러시리스 모터 + 하모닉 감속기.
- 장점: 고정밀, 고토크.
- 대표 기업:
- Harmonic Drive Systems(Harmonic Drive Systems) ★: 하모닉 감속기 글로벌 리더.
- Nabtesco(6268.T) ★: 산업용 로봇 감속기 시장 점유율 60%.
- 로보티즈(로보티즈): 소형 로봇용 액추에이터.
- Moog Inc(MOG.A): 항공 및 방산용 정밀 액추에이터.
- 로터리 액추에이터:
- QDD (Quasi-Direct Drive):
- 구조: 저감속 유성 기어 + 브러시리스 모터.
- 장점: 외력 감지, 저중량, 고반응성.
- 대표 기업:
- 로보티즈(로보티즈): QDD 기반 소형 액추에이터.
- 탁보그룹(601689.SZ): 테슬라 옵티머스 액추에이터 공급.
- QDD (Quasi-Direct Drive):
- 리니어 액추에이터:
- 구조: 볼스크류 또는 플래너터리 롤러스크류.
- 장점: 고하중 지지, 에너지 효율성.
- 대표 기업:
- Bosch Rexroth(BOSCH) ★: 산업용 리니어 액추에이터.
- SKF(SKF): 정밀 리니어 모션 시스템.
- Parker Hannifin(PH): 유압 및 전기식 리니어 액추에이터.
- 리니어 액추에이터:
2.2.2. 센서(Sensor)
시각 센서:
- LiDAR: 3D 맵핑 및 장애물 감지.
- Velodyne(VLDR), Luminar(LAZR).
- Depth Camera: Intel RealSense, Microsoft Azure Kinect.
- LiDAR: 3D 맵핑 및 장애물 감지.
힘/토크 센서:
- 정전용량 기반: 에이딘로보틱스(에이딘로보틱스).
- 스트레인 게이지 기반: ATI Industrial Automation.
촉각 센서:
- Meta의 Digit 360, SynTouch의 BioTac.
2.2.3. 배터리(Battery)
- 유형: 리튬이온 배터리.
- 대표 기업:
2.2.4. 컴퓨팅(Computing)
- 온보드 컴퓨팅:
- NVIDIA Jetson, Qualcomm Robotics RB5.
- 클라우드 컴퓨팅:
- AWS, Google Cloud, Microsoft Azure.
3. 휴머노이드 로봇 원가구성
테슬라 옵티머스 Gen2 기준:
- 액추에이터: 60% (로터리, 리니어 포함).
- 센서 및 제어기: 11%.
- 배터리 팩: 14%.
- 컴퓨팅 및 AI 모듈: 13%.
단가 절감 가능성:
- Wright’s Law 적용 시 누적 생산량 2배마다 단가 10~20% 감소.
- 목표: $20,000 (100만 대 생산 시).
4. 휴머노이드 로봇 밸류체인

4.1. R&D 및 AI 인프라
- Google DeepMind, OpenAI, NVIDIA(NVDA) ★.
4.2. 부품 공급
- 액추에이터: Harmonic Drive, Nabtesco, Moog.
- 센서: Velodyne, ATI Industrial Automation.
- 배터리: CATL, LGES, Panasonic.
4.3. 로봇 플랫폼
- Tesla(TSLA) ★: 옵티머스.
- Figure.ai(Figure): Figure 2.0.
- Boston Dynamics(Boston Dynamics): Atlas.
4.4. 통합 솔루션
- 삼성전자(005930.KS), 두산로보틱스(336260.KS).
4.5. 최종 고객
5. 관련 기업 리스트
5.1. Enabler (기술 제공 기업)
- NVIDIA(NVDA) ★: AI 및 GPU 플랫폼.
- Harmonic Drive(Harmonic Drive Systems) ★: 하모닉 감속기.
- Velodyne(VLDR): LiDAR 센서.
- CATL(300750.SZ) ★: 배터리.
5.2. Beneficiary (수혜 기업)
5.3. Enabler & Beneficiary
6. 시장 전망
- 글로벌 TAM: 약 30조 달러.
- 2030년: 8백만 대 보급, 매출 $4bn.
- 2050년: 6,300만 대 보급, 매출 $1tn.
7. 투자 전략
- Enabler 중심 투자: NVIDIA, Harmonic Drive.
- Beneficiary 중심 투자: Amazon, Coupang.
- 복합형 투자: Tesla, Toyota.
마지막 수정 일자